Bientôt, un robot endommagé ne devra plus être mis au rebut. En fabriquant des robots à partir de nouveaux matériaux intelligents, ils peuvent réparer eux-mêmes complètement les blessures graves. De ce fait, leur durée de vie est considérablement allongée, ce qui est à la fois écologiquement et économiquement intéressant.
Dans 10 ans, les robots feront partie intégrante de notre quotidien. Contrairement à la situation actuelle, où ils fonctionnent presque exclusivement dans des environnements industriels contrôlés, les robots vont nous assister dans un contexte beaucoup plus large. Les robots nous assisteront alors dans de nombreux endroits tels que dans les hôpitaux, dans les centres de soins résidentiels, dans nos maisons, sur les chantiers de construction, dans les transports et dans l'agriculture. Contrairement à un environnement d'usine structuré, les conditions ici sont imprévisibles. Les nouveaux robots se retrouveront régulièrement dans des situations où ils seront endommagés par des collisions inattendues, des contacts avec des objets pointus ou par une surcharge. Traditionnellement, nous résolvons ce problème en les rendant plus forts, plus durs ou plus gros, mais cela conduit à des robots surdimensionnés, trop gros ou trop lourds par rapport à la tâche qu'ils doivent effectuer, et donc inefficaces.
Dans mon doctorat, j'ai abordé ce problème d'une manière complètement nouvelle. Le corps humain n'est pas surdimensionné, au contraire, il est extrêmement efficace, mais en même temps vulnérable. Vous vous blessez probablement presque quotidiennement, mais heureusement, vous pouvez compter sur votre pouvoir de guérison. C'est incroyable de voir comment notre corps peut récupérer complètement, à la fois de petites plaies cutanées et de très grosses blessures comme une déchirure musculaire ou une jambe cassée. J'ai d'abord introduit ce principe de guérison dans la robotique, en fabriquant des mains robotiques à partir de matériaux auto-cicatrisants, des plastiques qui peuvent "guérir" de la même manière.
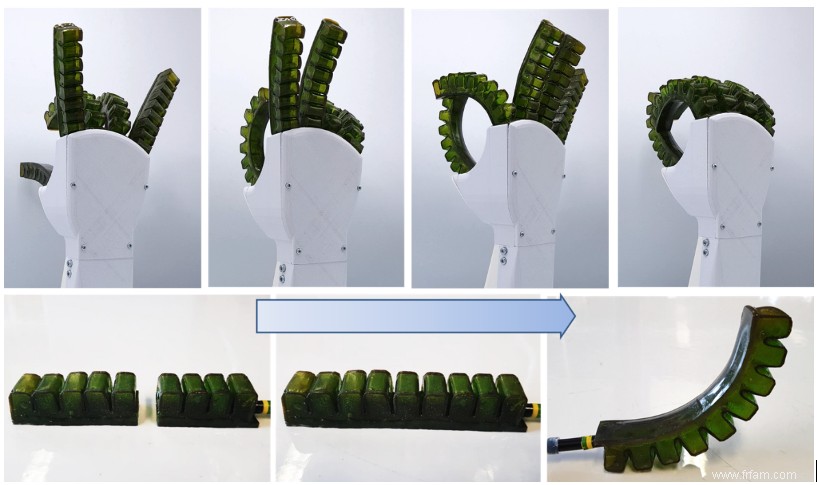
Le temps de récupération du matériel dépend de l'étendue et de l'emplacement des dommages et varie de quelques heures à quelques jours. Pour souligner cette particularité, j'ai coupé complètement l'un des doigts du robot en deux et j'ai remonté les pièces. Même ces lourds dégâts se sont complètement rétablis en quelques jours. La récupération complète signifie qu'après le processus de guérison, toutes les fonctionnalités telles que la puissance et la force maximale sont identiques comme avant. En d'autres termes, le doigt est à nouveau comme neuf.
En fabriquant des robots à partir de matériaux intelligents, vous introduisez l'intelligence artificielle au niveau matériel
L'intégration d'une capacité d'auto-réparation peut considérablement prolonger la durée de vie des pièces du robot, sans les surdimensionner. Ceci est économiquement intéressant car les coûts de réparation sont fortement réduits. De plus, l'empreinte écologique est réduite en raison de la durée de vie plus longue. De plus, les nouveaux matériaux que j'utilise sont entièrement recyclables, contrairement aux matériaux traditionnels que nous utilisons en robotique. La recyclabilité peut encore réduire l'impact écologique des futurs robots auto-cicatrisants. Je suis convaincu que cette recherche est une étape importante vers l'introduction de robots dans notre environnement immédiat de manière efficace, économique et écologique.
En collaboration avec d'autres scientifiques des matériaux de la Vrije Universiteit Brussel, je développe des matériaux synthétiques auto-cicatrisants. Ce sont des polymères en réseau qui se comportent comme une bande élastique et sont donc extensibles. Dans le réseau, vous trouverez des liaisons chimiques spéciales qui sont "réversibles". Quand ils se cassent, ils peuvent être reformés. Ces liaisons « Diels-Alder » constituent la base de la propriété réparatrice. En reconnectant et en reconstruisant progressivement le réseau à l'échelle moléculaire, une fissure, une fracture ou une coupure peut guérir. La propriété d'auto-guérison est particulièrement intéressante pour la prochaine génération de robots, qui seront mous.
Les spécialistes parlent souvent de la grande révolution robotique qui s'annonce. Mais à quelle fréquence croisez-vous un robot dans la rue, au travail ou dans un magasin ? De nombreux robots sont déjà actifs aujourd'hui, plus précisément 3 millions, mais ils opèrent principalement dans l'industrie manufacturière. Ces manipulateurs robotiques, les bras mécaniques typiques, fonctionnent dans des processus automatisés, dans lesquels ils effectuent très rapidement des tâches très précises. Par exemple, ils assurent la production rapide de voitures dans l'industrie automobile. Mais ils sont aussi dangereux, car ils sont gros et lourds d'une part, mais surtout parce qu'ils sont constitués de pièces métalliques dures. Une collision avec un ouvrier d'usine pourrait entraîner des blessures graves ou même la mort. Le contact entre les humains et les robots est évité en protégeant les robots dans des cages. À l'avenir, les robots fonctionneront également plus près de nous, d'où la nécessité d'une prochaine génération de robots plus sûrs.

Nous pouvons rendre les robots plus sûrs en les rendant plus souples pour créer
De cette nécessité est née il y a quelques années une nouvelle classe de robots, la « robotique douce ». Les robots souples, comme le robot câlin Probo, sont faits de plastiques souples, de polymères élastiques, comme le silicone ou le caoutchouc. En raison de leur flexibilité intrinsèque, les robots mous peuvent interagir en toute sécurité avec d'autres matériaux mous tels que notre corps. Cela en fait des candidats idéaux pour les applications où les robots doivent travailler en étroite collaboration avec les gens, comme dans le secteur de la santé. Mais parce que ces nouveaux robots sont mous, ils sont très sensibles aux dommages. C'est pourquoi je me concentre principalement sur la fabrication de robots mous auto-réparateurs.


En plus des mains robotiques, j'ai également développé des préhenseurs souples pour l'industrie alimentaire. Grâce à leur flexibilité, ces pinces sont idéales pour cueillir des fruits et légumes délicats avec le soin nécessaire. Ils sont souvent endommagés par des épines et des branches acérées. Enfin, j'ai fabriqué des muscles artificiels capables d'alimenter des systèmes robotiques tels que des «exosquelettes» et des prothèses. Ceux-ci éclatent régulièrement lorsqu'ils sont surchargés. J'ai également endommagé ces pinces et ces muscles à plusieurs reprises avec toutes sortes d'objets tranchants, mais j'ai toujours pu récupérer complètement, tout comme les mains. A travers cette série de prototypes, je mets l'accent sur le potentiel fascinant des robots mous autoréparateurs pour des applications industrielles et commerciales. La recherche se poursuit actuellement dans deux projets européens SHeRo (http://www.sherofet.eu/) et SMART (http://www.smartitn.eu/).
Seppe Terryn a été nominé pour la Flemish PhD Cup. Découvrez-en plus sur ses recherches sur www.phdcup.be.
